BeamNG.tech new functionalities, update of Python API, Simulink bridge and other existing features, first (Beta) release ROS2 bridge and new LIN-bus communication support.
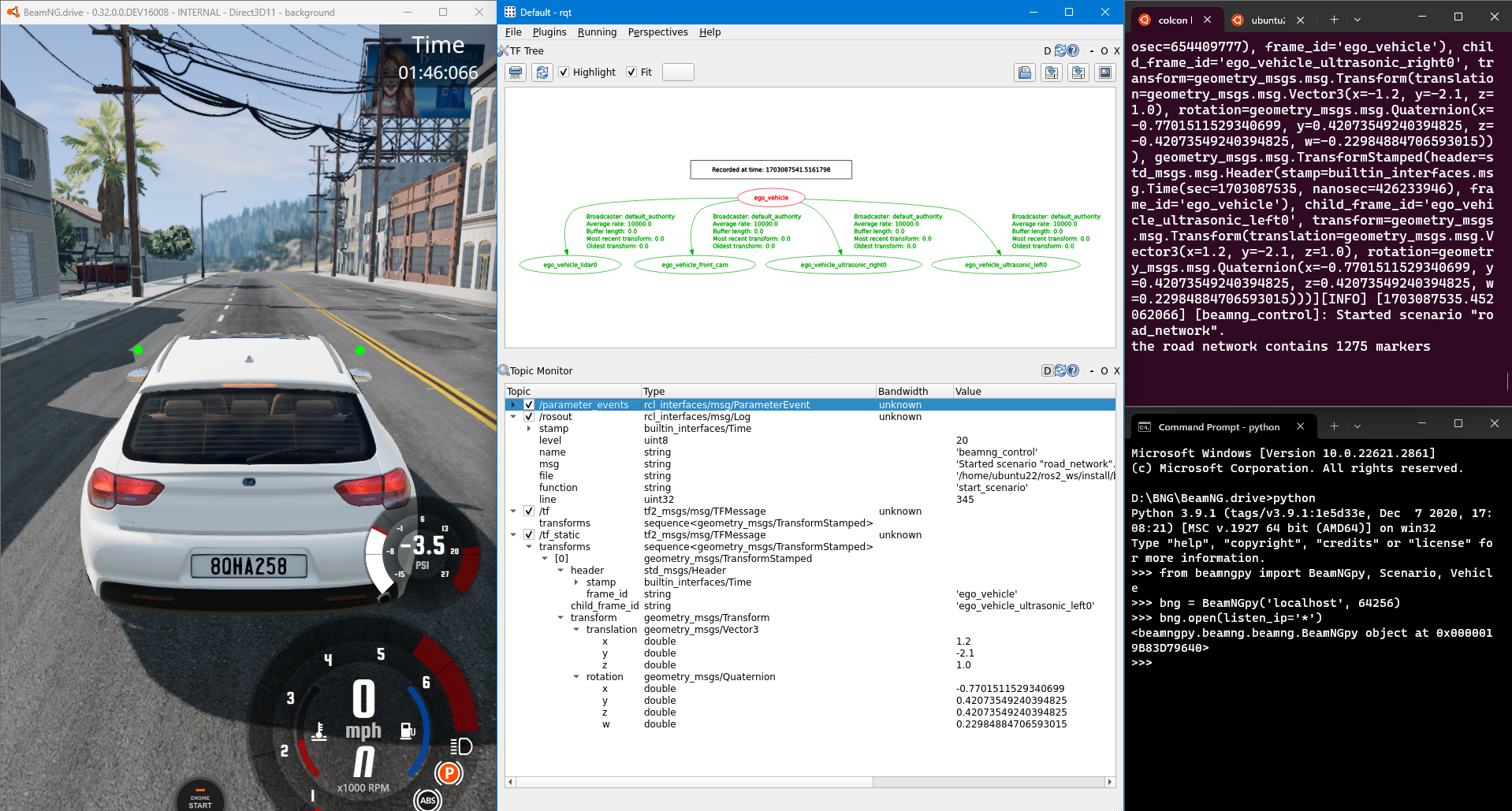
Our BeamNG.tech v0.31 release supports a preliminary version of the ROS2-bridge, now accessible through our the dedicated repository. Our existing ROS1 bridge is also compatible with v0.31. For Mathworks-related features, you can now access the BeamNG to Simulink bridge from Linux. The interface to Mathworks is always available as a Mathworks toolbox.
In addition to the existing CAN-Bus interface, BeamNG.tech v0.31 now supports LIN-Bus communication, expanding our connectivity capabilities. The MQTT controller, previously available, is now integrated into the BeamNG.tech build, streamlining its access and utilisation. Another released feature is the ability to import heightmaps via the Python API, further enhancing the versatility of BeamNG.tech.
As always, BeamNG.tech v0.31 encompasses all updates from the BeamNG.drive 0.31 release, ensuring a comprehensive user experience. You can access the detailed report on BeamNG.drive v0.31 here.
And here is the changelog for v0.31:
New features
- ROS2-bridge preliminary version, with minimal functions;
- Linux support for Simulink bridge;
- LIN-Bus communication with BeamNG.tech;
- HMI signals for ADAS, according to ISO standards, available for the ETK 800 and the ETK K vehicle models;
- Heightmaps import.


Changes / improvements
- MQTT controller is included in the simulator files, in lieu of external repository before;
- fixed the extension : vehicle/extensions/vehicleStatsLogger.lua;
- tech/techCore extension does not start the BeamNGpy server on load; to start the server, run tech_techCore.openServer() after loading the extension;
- change of reference point to the relative distance computation, on ideal RADAR sensor.
Bug fixes
- launch files in ROS1 bridge for beamng_agent and beamng_teleop_key;
- fix issue on ACC : when the user would deactivate the function, the sensor would be removed and yet solicitated;
- bug in S-function, fix windows send function.
BeamNGpy-related changes
-
Added functionality which allows the import of heightmaps, from 2D python arrays;
-
Optimized network communication by removing extra acknowledgements;
-
Changed the way of launching BeamNG.tech from BeamNGpy; if you are launching BeamNG.tech without BeamNGpy and want to connect BeamNGpy later, you should change the command-line arguments you are using to:
BeamNG.tech.x64.exe -console -nosteam -tcom-listen-ip 127.0.0.1 -lua extensions.load('tech/techCore');tech_techCore.openServer(64256) -
Added examples on sensors use :
- to ideal radar sensor, for plotting output data and for object tracking;
- to roads sensor, for plotting the road profile;
-
Vehicle.logging module has been fixed. The user can easily get the VSL log files in their userfolder;